Myron can solve linear equations using Gaussian elimination.
Before showing how easy this can be, let's solve the following set of
equations using isolation and substitution.
5.2.1 Substitution and Isolation
Consider the linear
system
(6⋅z=18, 2⋅x+10⋅y-4⋅z=4, 2/3⋅x+4⋅y=6)ℓ.
(1)
Solve the first equation by isolating[1]z: z=3.
Then isolate x in the third equation: x=(6-4⋅y)⋅3÷2.
This isn't very tractable, so distribute the 3 [2],
then the 2 [3] and simplify to get
x=-6⋅y+9.
(2)
Substitute x and z into the second equation
[4], distribute the 2 and simplify
[5], move the two terms in y together
[6] and factor those two terms
[7]. Isolate y to give y=1.
Now substitute y into (2) and simplify to yield x=3.
The solution is
(x=3, y=1, z=3).
(3)
5.2.2 Inconsistent Equations
The set of linear equations
(2⋅x+6⋅y=2, 4⋅x+2⋅y=-6, 4⋅x+4⋅y=-2)ℓ
(4)
contains three equations in two unknowns. Solving the first for y using
the techniques above yields the equation y=-(1/3)⋅x+1/3.
Substituting y into the second equation gives x=-2.
Substituting both x and y into the third equation yields
-4=-2, which is inconsistent.
We'll return to this idea of inconsistency a little later, but first let's see
what's happening from a graphical view.
We'll start by solving each of the three equations for y and then
plotting them. This is easy to do by selecting y and isolating in each case.
We'll get y=-(1/3)⋅x+1/3 as before, as well as
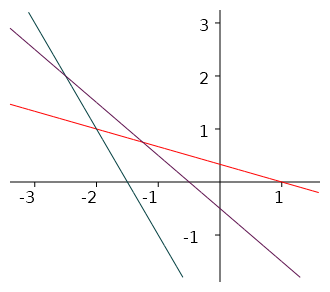
y=-2⋅x-3 and y=-x-1/2.
Plotting these, the problem becomes apparent.
Figure 5.1 Inconsistent equations
As shown in Figure 5.1, the lines don't all cross at the same location.
However, if the third equation was changed to 4⋅x+4⋅y=-4, the situation would change,
with all three lines crossing at (x=-2, y=1).
This example illustrates a significant
principle of linear algebra, which will be stated first in a simplistic and slightly misleading way:
the solution to a system of linear equations, when
only one exists, is a point
in space where all of the lines represented by the equations in the system intersect.
The simplification to points and lines
is misleading because higher dimensions admit points, lines, planes and
higher-dimensional linear surfaces.
The error becomes apparent when other forms of linear solutions are stated:
two planes can intersect on a line; three planes can intersect on the same line or
on two different lines which can intersect at point. The latter statement
illustrates that a solution can “jump a dimension”, meaning that
the intersection of two 3-dimensional objects can result in a 1-dimensional object.
These ideas extend to higher dimensions, in which a hyper plane (the plane-like object
one dimension less than the containing dimension) can intersect with another hyper plane to produce
lower-dimensional objects.
5.2.3 Redundant Equations
It is not necessary to have n equations in n unknowns. Here is an
example with 3 equations in 2 unknowns that has a solution.
(1/2⋅x-y=1/2, x+y=1, 1/2⋅x+y=1/2)ℓ.
(5)
Isolating y in the first equation[8], substituting into the
second[9] and isolating x yields x=1.
Substituting the latter into the first and simplifying gives y=0. These values
are also a solution to the third equation. One of these equations (it doesn't matter which one)
is redundant.
5.2.4 Multiple solutions
This system of equations has an infinity of solutions:
(a+b+2⋅c=0, b+2⋅c=0).
(6)
Isolating b in the second equation gives b=-2⋅c. Substitution
into the first[10] gives a=0.
For any value of c, there is a solution with (a=0, b=-2⋅c, c).
We can write this as a function of c like this: fʋ(c)→(0, -2⋅c, c)ʋ,
so for example, fʋ(0) has a solution (0, 0, 0)ʋ and fʋ(1)
has a solution (0, -2, 1)ʋ.
Other solutions can be seen by evaluating fʈ(0) at several points.
For example, (fʈ(i)|i∈1, 10, 3) evaluates to four solutions: